CenterNet
论文名称:Objects as Points
代码链接:https://github.com/xingyizhou/CenterNet
主要贡献
构建模型时将目标作为一个点——即目标BBox的中心点。我们的检测器采用关键点估计来找到中心点,并回归到其他目标属性,例如尺寸,3D位置,方向,甚至姿态。
第一,我们分配的锚点仅仅是放在位置上,没有尺寸框。没有手动设置的阈值做前后景分类。(像Faster RCNN会将与GT IOU >0.7的作为前景,<0.3的作为背景,其他不管);
第二,每个目标仅仅有一个正的锚点,因此不会用到NMS,我们提取关键点特征图上局部峰值点(local peaks);
第三,CenterNet 相比较传统目标检测而言(缩放16倍尺度),使用更大分辨率的输出特征图(缩放了4倍),因此无需用到多重特征图锚点;
网络结构
backbone
骨架网络采用了4种,分别是ResNet-18, ResNet-101, DLA-34和Hourglass-104。
head
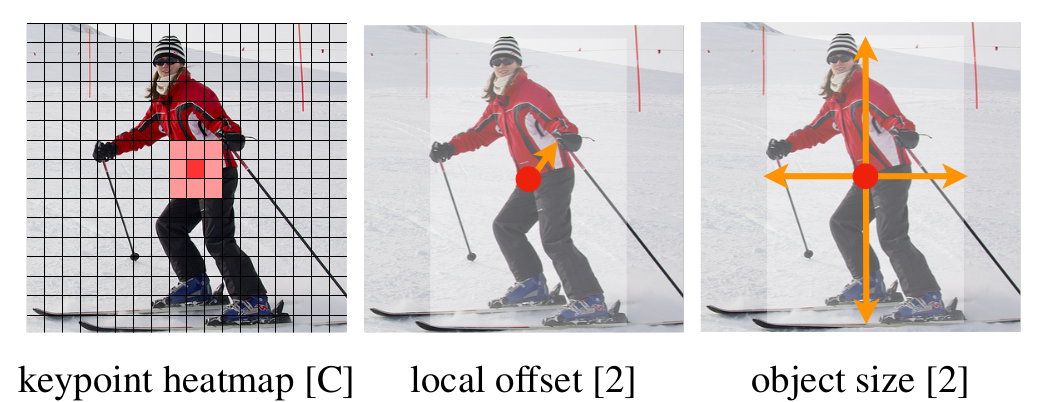
对于目标检测而言,输出三个特征图,分别是高斯热图(h/4,w/4,cls_nums),每个通道代表一个类别;宽高输出图(h/4,w/4,2),代表对应中心点处预测的宽高;中心点量化偏移图(h/4,w/4,2),这个分支对于目标检测而言可能作用不会很大,因为我们最终要的是bbox,而不是中心点,但是对于姿态估计而言就非常重要了。
Loss计算
\[L=L_{k}+\lambda_{size} L_{size}+\lambda_{off} L_{off}\]heatmap部分损失函数:和cornernet一样GaussianFocalLoss,只是生成heatmap的高斯中心不再是角点,而是gt中心,高斯半径r计算和cornernet一样,按道理是通过iou约束计算到的r,角点和中心计算方式不同,但作者认为影响不大。后续TTFNet算法有改进。
\[L_{k}=\frac{-1}{N}\sum_{c=1}^{C}\sum_{i=1}^{H}\sum_{j=1}^{W}\left \{ \begin{array}{c} (1-p_{cij})^{\alpha}\log(p_{cij}) & \text{if } y_{cij}=1 \\ (1-y_{cij})^{\beta}(p_{cij})^{\alpha}\log(1-p_{cij}) & \text{otherwise} \end{array} \right.\]offset部分损失函数:和cornernet一样,是表示在取整计算时丢失的精度信息,但这里使用的L1损失。$ \hat{O_\tilde{p}}$是预测的offset,$(\frac{p}{R}-\tilde{p})$是实际offset。
\[L_{off}=\frac{1}{N}\sum_{p}\left | \hat{O_\tilde{p}}-(\frac{p}{R}-\tilde{p})\right|\]size部分损失函数:$s_k$是gt下采样的长宽,也是使用的L1损失
\[L_{size}=\frac{1}{N}\sum_{k=1}^{N}\left | \hat{S_{p_{k}}}-s_k\right|\]论文中$\lambda_{size}=0.1$,$\lambda_{off}=1$
head输出[80x128x128], [2x128x128], [2x128x128]
推理流程
最终网络在每个位置预测c+4个输出,c是类别数,4则包含横向和纵向的offset以及宽高。前向阶段,对于每个类别的热度图,提取峰值点,若一个点的值大于等于其周围八个点的值(通过3x3maxpool),则认为是峰值点,选取top100个峰值点,代码中采用0.3作为阈值对这些峰值点进行筛选。bbox坐标转换:
\[(\hat{x_i}+\sigma\hat{x_i}-\hat{w_i}/2,\hat{y_i}+\sigma\hat{y_i}-\hat{h_i}/2,\\\hat{x_i}+\sigma\hat{x_i}+\hat{w_i}/2,\hat{y_i}+\sigma\hat{y_i}+\hat{h_i}/2)\\ (\sigma\hat{x_i},\sigma\hat{y_i})=\hat{O}_{\hat{x_i},\hat{y_i}}\\ (\hat{w_i},\hat{h_i})=\hat{S}_{\hat{x_i},\hat{y_i}}\]